普涨行情就可以看出研习题材的价值了。
在我关注的题材中,之前提到过的题材今天均有不错表现

机器人之前只说了一个细分-减速器,今天展开说下
一、人形机器人
所处阶段:从“0”到“1”的萌芽期
必要性:极大解放生产力、改善人类生活需求,应对全球人口老龄化;
确定性:AI赋能使得其拥有思考能力成为可能且极大加速“大脑”和“小脑”能力的发展,硬件端已可实现基础动作和交互功能;
发展节奏:中短期人形机器人商业化落地成为可能,当前阶段重点跟踪AI技术进展对人形机器人的赋能、产业/技术的最新进展,特别是特斯拉的进展。
软件端:AI发展跨过“奇点”,带动其爆发式发展;
硬件端:与工业机器人以及汽车等产业有重合的零部件产业链,无需从头开始,有机会比新能源汽车更快实现降本提质。
跨入从“1”到“N”的前提:解决通用性和成本问题,做好道德风险防范。
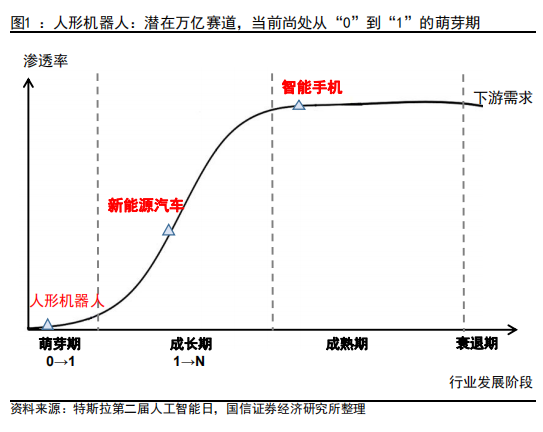
马斯克在特斯拉股东大会表示,特斯拉长期价值可能来自于Optimus人形机器人,如果人形机器人和人的比例是2:1左右,那么人们对机器人的需求量可能是100亿乃至200亿个,远超电动车的数量;
根据高盛最新预测,乐观状态下2025-2035年人形机器人销量CAGR可达94%左右;如果参照全球电动汽车与智能手机发展历程,中性预计2025-2035年人形机器人销量CAGR为40%左右。
5月16日,NVIDIA(英伟达)创始人黄仁勋表示,下一波人工智能浪潮是“具身人工智能(embodied AI)”。具身人工智能是指有身体并支持物理交互的智能体,能与环境交互感知,自主规划、决策、行动。此前人类依赖手写代码来控制机器人,而进入AIGC时代,GPT等AI大模型有望有效解决这一痛点。
二、以特斯拉Optimus为例,人形机器人感知、执行系统拆分
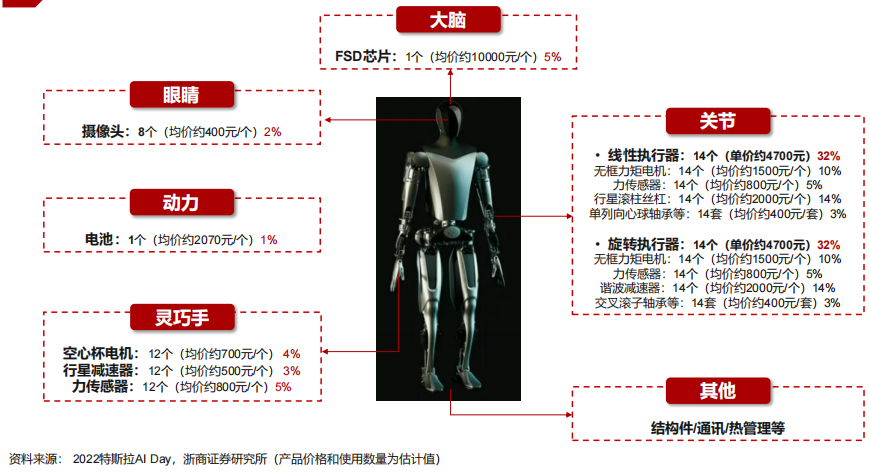
以特斯拉Optimus为例,2023年人形机器人核心零部件价值量分布:
1)具身执行:主要部件价值量占比约62%,主要由无框力矩电机、减速器、丝杠、空心杯电机、轴承等构成。
2)具身感知:主要部件价值量占比约18%,主要由摄像头、力传感器、惯导imu等构成。
三.控制与执行系统:具身智能的执行系统,核心部件价值量占比约62%
3.1伺服系统:国内龙头厂商性能已具备国际水平
每台人形机器人需要一套伺服系统:
我国工业机器人伺服系统市场可分为三个梯队:
日系:市占率32%以上,主要为安川、松下、三菱、山洋等;
欧系:市占率8%以上,主要为西门子等;
国产:汇川、台达、禾川、埃斯顿等;
台达集团、汇川技术等公司作为我国伺服系统国产替代龙头,在编码器分辨率、过载能力、最高转速、频率响应速度等方面已具备与外资龙头同等参数水平。
伺服系统相关公司:
汇川技术:伺服系统市占率A股第一,2022年国内市占率21.5%。
禾川科技:伺服系统市占率A股第二,2022年国内市占率3.4%。
埃斯顿:伺服系统市占率A股第三,2022年国内市占率2.7%。
信捷电气:伺服系统市占率A股第四,2022年国内市占率2.6%。
3.2 电机:人形机器人中主要采用舵机、空心杯电机等
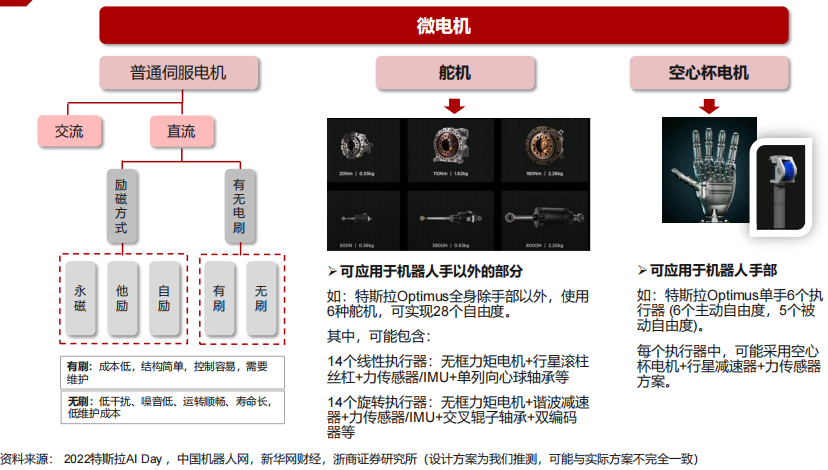
空心杯电机:应用于人形机器人的机械手部关节
人形机器人的机械手主要有两种模式:
内置驱动:将驱动器、传感器等集成于人形机器人手掌内部。
外置驱动:将驱动器外置于手臂,采用腱绳驱动方式远端控制关节运动。特斯拉Optimus即可能采用外置驱动方式。
人形机器人的最后末端的操作包括力反馈等,用的基本都是空心杯的有刷电机或者空心杯的无刷直流电机。目前空心杯电机的主流供应商主要是瑞士的 maxon,德国FAULHABER。
有刷空心杯电机:采用空心转子设计方案,具有高加速度、低转动惯量、无齿槽效应、无铁损小巧轻便等特点、非常适合频繁启停、对舒适度和便捷性有要求的手持应用。
无刷空心杯电机:难点在于产品设计与制造工艺,其中大批量生产为核心难点,手工制作方式在生产效率、产品稳定性方面无法满足客户需求。瑞士 Maxon 和德国 Faulhaber 掌握了大批量生产的核心工艺,国内大多数厂商主要受制于此项工艺。
空心杯电机:国内无刷空心杯技术与国际龙头仍有差距

资料来源:各公司官网,浙商证券研究所
空心杯电机国产品牌:鸣志电器 鼎智科技 江苏雷利、拓邦股份
无框力矩电机:应用于人形机器人身体关节
无框力矩电机:是一种以输出扭矩为衡量指标的无框架式永磁电机。它的基本操作就像传统的永磁电机一样。无框力矩电机由驱动器供电,驱动器控制U/V/W三相电形成电磁场,永磁体的转子在此磁场的作用下转动。目前无框力矩电机主要用于协作机器人。
无框力矩电机:国内无框力矩电机已具备一定竞争力
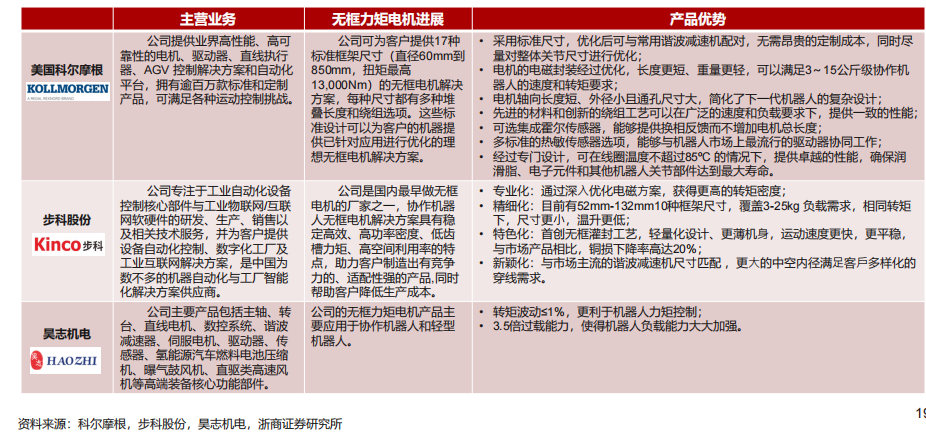
无框力矩电机相关公司:步科股份、昊志机电
3.3 丝杠:人形机器人中,行星滚柱丝杠应用广泛

行星滚柱丝杠:传动原理与行星轮系相似,丝杠类似太阳轮,滚柱作为行星轮,螺母作为齿圈,当丝杠旋转时,滚柱围绕丝杠作行星运动,同时通过螺旋传动原理将丝杠旋转运动转化为螺母直线往复运动。
以往行星滚柱丝杠产能主要集中于欧洲、美国等,国内企业较少布局。国内企业目前市占率较小,目前还是主要依靠海外进口。
海外龙头:瑞士GSA、德国Rexroth、瑞典斯凯孚、美国Moog、美国Nook等;
国内企业:鼎智科技、博特精工、汉江机床、新剑传动等,具备小规模研发生产能力。
股牛牛丝杠题材梳理:贝斯特、江苏雷利、五洲新春等
总成:拓普集团
3.4 减速器
谐波减速器:
绿的谐波:谐波减速器市占率A股第一,行业第二,市占率26%。
汉宇集团:谐波减速器市占率A股第二,行业第五,市占率6%。
昊志机电:谐波减速器已经达到较高的精度及寿命标准,相关产品已开始实现批量销售。
RV减速器:
双环传动:RV减速器市占率A股第二,市占率15%。
中大力德:RV减速器市占率A股第三,市占率4%。
轴承:力星股份、国机精工、五洲新春
总成:三花智控
四.感知系统:具身执行的感知系统,主要部件价值量占比约18%
4.1传感器,人形机器人不可或缺的感知器官
传感器是一种检测装置,能够感受被测量的信息并将其转化成可用的信息输出。传感器之于机器人相当于人类各感知器官,机器人通过各类传感器识别外部信息,并作出判断和下一步动作。
传感器按检测对象可划分为内部传感器和外部传感器。内部传感器用以感知机器人的内部状态,包括位置传感器、速度传感器、力传感器和平衡传感器。外部传感器用于测量机器人外部环境及状态,包括视觉传感器、触觉传感器、听觉传感器、嗅觉传感器和味觉传感器。
力传感器是将力的量值转换为相关电信号的器件。根据所测力的维数不同,力传感器可被分为一维至六维传感器。较为流行的六维力传感器能够在笛卡尔坐标系中同时测量力和力矩并且可以各三个分量的转换成为电信号。力传感器被广泛用于机器人各关节处。
位置传感器可将被测物体的位置转换为输出信号,获得准确的线性位置、旋转和角度位置信息,是控制人形机器人运动的重要一环。
传感器相关公司:
柯力传感:力学传感器、应变式传感器市占率A股第一。公司拥有多年全国第一市场占有率力学传感器品牌。
昊志机电:产品涵盖高端主轴,转台、直线电机、数控系统、谐波减速器、伺服电机等功能部件。代表性传感器:2022年报中披露六维度力钜传感器。
汉威科技:柔性微纳传感器能够实现压力、温湿度等感知,可以广泛应用于消费电子、智慧医疗、人机交互等场景。不排除柔性微纳传感器未来会应用于人形机器人领域,但相关应用目前尚处于早期研发阶段。
奥普光电:子公司禹衡光学生产的光栅传感器可用于智能协作机器人、机械手、汽车智能激光雷达等领域,并已实现销售。
4.2 惯导:国际龙头份额集中,国产厂商积极突破
MEMS IMU市场份额分布相对集中,国际厂商占据垄断地位。前三名国际厂商共占据近80%市场份额,前五名国际厂商共占据超90%市场份额。其中BOSCH以33%的市场份额排名第一,ST和TDK分别以25%和21%的市场份额紧随其后。
相较于前五名国际厂商,本土厂商市场份额比较小,面临的市场竞争压力也较大。由于MEMS IMU产品生产工艺难度大,只有头部企业才有足够的资金、技术和资源来应对市场竞争,因此准入门槛不断提高,国内参与竞争的厂商较少。在国内布局汽车惯导的企业有华依科技、华测导航、导远电子等公司。
惯导相关公司:华依科技、华测导航
4.3
机器视觉(摄像头、雷达等):奥比中光、舜宇光学
毫米波雷达:德赛西威、华域汽车等
5.机器人控制器
机器人控制器:埃夫特、新时达等
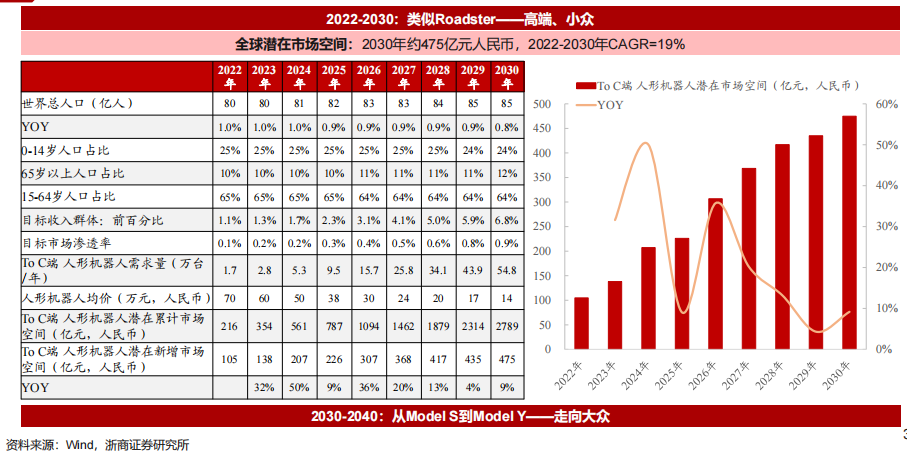
6.1 人形机器人:从小众高端走向大众化,2030年市场有望达475亿元
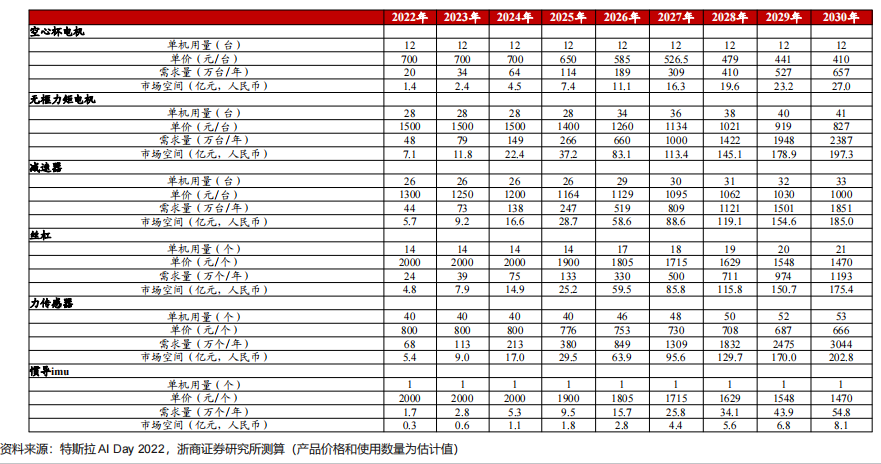
6.2 人形机器人:核心零部件市场空间测算
6.3 行星滚柱丝杠、空心杯电机等部件具备更好的投资价值
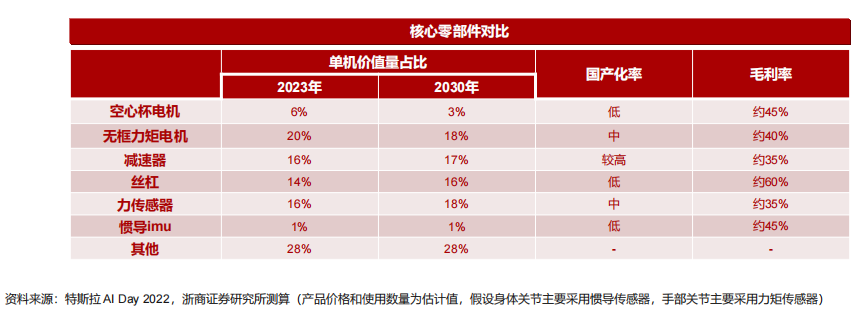
三个维度对比人形机器人核心零部件投资价值:
1)单机价值量占比:无框力矩电机>减速器>力传感器>行星滚柱丝杠>空心杯电机>惯导 >其他,空心杯电机、无框力矩电机等降本空间较大。
2)国产化率:行星滚柱丝杠、空心杯电机、惯导等国产化率较低,国产替代空间大。
3)毛利率:行星滚柱丝杠、空心杯电机、惯导等毛利率较高。
风险提示:人形机器人商业化进程不及预期;下游需求不及预期;国产零部件厂商订单低于预期的风险等。
本内容仅作为信息资讯参考,不构成具体投资建议。知道哪些题材有哪些公司还远远不够。您仍需独立做出投资决策,风险自担。市场有风险,投资需谨慎。
坚持不易,请多多点赞。点的越多,普涨的行情越多。

主题:关注三个交易日持续性方向!